
A partire dal 2015 il mercato dei droni è in crescita costante. A questa crescita da qualche anno sta contribuendo anche la categoria degli Unmanned Underwater Vehicles (UUV), meglio conosciuti come Droni Subacquei.
BREVE STORIA DEI DRONI SUBACQUEI
Sebbene abbiano raggiunto il mercato commerciale solo da pochi anni i droni subacquei sono una realtà ben strutturata da molto tempo. I primi modelli infatti vennero prototipati e costruiti intorno al 1950 grazie ai fondi provenienti dall’esercito statunitense ed il loro sviluppo, come molte altre tecnologie belliche nel corso della Guerra Fredda, finì sotto il controllo della Marina Militare USA.
Per tutti gli anni ’60 questi droni continuarono ad essere migliorati ed utilizzati principalmente come dragamine subacquee. Il 17 gennaio 1966 a largo delle coste della Spagna un bombardiere B-52 durante le manovre di avvicinamento per un rifornimento in volo si scontrò con un’aerocisterna provocando un incidente nucleare.
Il B-52 precipitato stava trasportando 4 bombe nucleari non armate, una delle quali non fu rinvenuta. Le operazioni di ricerca andarono avanti per 81 giorni fino a quando non venne localizzata da un sottomarino americano sul fondale del Mediterraneo a 770 metri di profondità. Durante le complicate operazioni di recupero venne utilizzato anche il drone subacqueo CURV-l.
Nel corso degli anni ’70 il CURV-lll, la quarta generazione del drone impiegato nel disastro di Palomares, fu fondamentale nel salvataggio dell’equipaggio di un piccolo sommergibile commerciale. Era il 29 agosto 1973 a largo di Cork, nel sud dell’Irlanda, i piloti Roger Chapman e Roger Mallinson a bordo del Pisces III, erano impegnati nella posa di cavi telefonici sul fondale marino. Durante le fasi di recupero per riportare il sommergibile alla nave madre l’improvvisa rottura del cavo fece precipitare il sottomarino a 488 metri sul fondo del mare. Iniziò così una corsa contro il tempo per il salvataggio dei due uomini che si concluse, dopo 76 ore e diversi tentativi falliti, grazie all’indispensabile aiuto del CURV-III che riuscì ad agganciare un nuovo cavo al sommergibile eseguendo così il soccorso subacqueo più profondo della storia. Al momento del salvataggio all’interno del sottomarino restavano solo 12 minuti di ossigeno.
Dopo il recupero del Pisces III l’interesse per questa tecnologia aumentò in maniera considerevole. I droni subacquei cominciarono così ad essere utilizzati e sviluppati anche al di fuori dell’ambito militare soprattutto per andare in aiuto agli studi scientifici dei fondali marini.
Ma è nel decennio successivo grazie al ritrovamento del Titanic, sul fondale dell’Oceano Atlantico a 3.800 metri di profondità, che i droni subacquei si guadagnarono la ribalta mondiale. La spedizione di ricerche del relitto del transatlantico era in realtà la copertura per un’altra operazione molto più importante, il recupero di due sottomarini nucleari americani: il Thresher e lo Scorpion.
Robert Ballard, il responsabile della spedizione, oltre ad essere il più celebre scienziato oceanografico del mondo era anche un comandante della Marina Militare statunitense impegnato in una missione Top Secret. Dopo aver trovato ed esplorato i due sottomarini a Ballard restavano risorse solo per altri 12 giorni di ricerche per trovare il Titanic.
All’improvviso il 1° settembre 1985 mentre scandagliavano il fondale marino con “Argo”, un nuovo e sofisticato tipo di drone sviluppato dalla Marina Militare, iniziarono ad apparire sui monitor della nave da ricerca le immagini di una scia di detriti che li guidarono fino al relitto. Dopo 73 anni, Argo stava regalando al mondo intero le prime suggestive immagini del Titanic affondato nelle acque gelide dell’Atlantico, durante il suo viaggio inaugurale, la notte del 14 aprile 1912 dopo l’impatto con un iceberg.
Dal 1990 in avanti con l’avanzare della tecnologia robotica, il miglioramento delle performance delle batterie elettriche e grazie a nuovi e più performanti metodi di controllo dalla superficie, i droni subacquei incrementarono la loro capacità di assolvere ad un sempre maggior numero di compiti, una volta delegati solo a sommozzatori o palombari. Tutti questi miglioramenti, di fatto, portarono ad un aumento delle tipologie di industrie in grado di sfruttare i droni subacquei a loro vantaggio.
Il 2001 fu l’anno della vera svolta. L’introduzione delle batterie a polimeri di litio risultò decisiva, così come in molte altre tecnologie, per un clamoroso miglioramento dei droni subacquei a livello costruttivo. Riduzione del volume, del peso e di conseguenza la possibilità di aumentare la durata delle missioni furono basilari nella loro evoluzione. Inoltre, grazie a queste migliorie, divenne possibile eseguire le missioni operando da barche di dimensioni più contenute con un equipaggio ed un numero di tecnici più limitati.
Da allora i miglioramenti sono stati continui ed al passo con l’evoluzione tecnologica sia per usi strettamente militari che per utilizzi a scopo scientifico. Nella parte finale di questa guida ci focalizzeremo, in maniera particolare, sui droni subacquei di tipo commerciale accessibili a chiunque, a scopo di studio o anche solo a scopo prettamente ludico ma, come vedremo, ben lontani dal poter essere considerati semplici “giocattoli”.
TIPOLOGIE DI DRONI SUBACQUEI
Come i droni aerei anche quelli subacquei sono caratterizzati dall’essere identificati da una lunga serie di acronimi a seconda della tipologia e dell’utilizzo che ne viene fatto. Abbiamo già preso in considerazione la sigla UUV cioè Unmanned Underwater Vehicle che identifica, come si intuisce dal nome stesso, qualsiasi mezzo senza equipaggio a bordo in grado di operare al di sotto della superficie dell’acqua, con o senza input ricevuti da un operatore dalla superficie. Proprio sulla base di questa ultima affermazione gli UUV si dividono in due principali sottocategorie: i Remotely Operated Underwater Vehicle (ROV) cioè quelli mossi direttamente da un radiocomando nelle mani di un operatore al di sopra della superficie dell’acqua e quelli noti come Autonomous Underwater Vehicle (AUV) ad indicare la loro capacità di muoversi in autonomia sott’acqua grazie ad un intelligenza artificiale programmata in precedenza senza necessità di input diretti da parte di un operatore umano.
Pur sapendo di esporre il fianco a qualche critica vogliamo aggiungere a questa guida una terza tipologia di UUV: conosciuti come Diver Propulsion Device (DPV) o anche come Underwater Propulsion Vehicle (UPV) ma più spesso chiamati semplicemente scooter subacquei. L’eccezione di includere questa tipologia all’interno della classificazione di droni subacquei, dato che tecnicamente parlando sono “manned” (cioè pilotati dall’uomo), è dovuta principalmente al ruolo che spesso rivestono nello sviluppo degli UUV ma anche per il loro essere menzionati quando si parla di questa tipologia di droni. Vediamo ora di assimilare qualche informazione su tutte e tre queste tipologie:
COS’E’ UN ROV (Remotely Operated Underwater Vehicle)?
È la tipologia che senz’altro meglio definisce questa categoria nella nostra mente, quella che ci sovviene non appena sentiamo parlare di droni subacquei. In italiano prendono il nome di sottomarini a comando remoto. Come abbiamo già detto si tratta di veicoli in grado di operare al di sotto della superficie dell’acqua senza pilota a bordo. La loro configurazione minima operativa è composta da tre elementi: il veicolo subacqueo stesso, quello che viene chiamato cavo ombelicale (“tether” in inglese) in grado di trasmettere segnali, energia e comandi ed una stazione di superficie. Alcuni modelli, dalle dimensioni maggiori, sono associati a sistemi di lancio e di recupero, detti LARS (Launch and Recovery System) e ad un sistema di gestione dell’ombelicale, detto TMS (Tether Management System).
È possibile tracciarne la posizione in acqua con precisione tramite diversi sistemi di posizionamento acustico subacqueo, che si differenziano tra di loro sulla base del piazzamento di trasmettitori, ricevitori e di altre attrezzature necessarie alle operazioni di localizzazione. Il sistema più adatto viene scelto a seconda dell’accuratezza della posizione del ROV necessaria alla missione.
I ROV a loro volta si suddividono in diverse classi:
Classe I – ROV da Osservazione.
Di piccole dimensioni hanno una dotazione semplice composta da una camera, luci ed un sonar. Il loro scopo primario è quello di semplici osservatori. Chiamati anche “Eyeball” sono perlopiù usati nelle operazioni di ispezione di piattaforme a basse profondità grazie alla loro eccellente manovrabilità ed alle dimensioni contenute. Ultimamente vengono anche adoperati nell’ispezione di condutture e tubazioni di medie e grandi dimensioni e nei grandi allevamenti ittici a scopo di controllo. Possono raggiungere una profondità massima di circa 300 metri.

Classe II – ROV da osservazione con Payload.
Di medie dimensioni (possono arrivare a pesare anche 500 Kg) sono equipaggiati con due camere come dotazione standard; possono inoltre ospitare una nutrita serie di sensori per la scansione dei fondali marini o piccoli manipolatori idraulici in grado di eseguire semplici lavori come l’apertura o la chiusura di valvole sottomarine o il recupero e spostamento di oggetti di piccole dimensioni. Il loro scopo principale è, anche in questo caso, quello di ispezionare piattaforme o di assistere i sommozzatori nelle operazioni più a rischio. Possono raggiungere una profondità massima di circa a 3.000 metri.

Classe III – ROV da lavoro.
Di notevoli dimensioni montano almeno tre telecamere ad alta risoluzione e molteplici sensori per la scansione e la mappatura dei fondali; hanno una struttura differente dai precedenti in quanto sono costruiti per poter reggere pressioni molto più importanti. Circuiti idraulici separati gestiscono una propulsione delle eliche fino ad oltre 200 cavalli di potenza e due potenti manipolatori. Sono perlopiù usati dalle compagnie per la costruzione ed il mantenimento di campi petroliferi ad elevate profondità, infatti possono inabissarsi fino a 10.000 metri nei fondali marini.

Classe IV – ROV trencher.

Classe V
Questa classe è destinata ai soli prototipi in via di sviluppo e spesso anche alla classe degli AUV (vedi paragrafo successivo).
COS’E’ UN AUV (Autonomous Underwater Vehicle)?
È la tipologia di droni subacquei che non richiede un intervento diretto dell’uomo durante il suo funzionamento, ma che viene programmata precedentemente per eseguire determinati compiti per poi svolgerli in totale autonomia senza più nessun comando diretto dalla superficie. Potremmo considerarli come la controparte di quello che è Curiosity, il rover della NASA su Marte, per i droni terrestri ma operanti sotto la superficie dell’acqua.
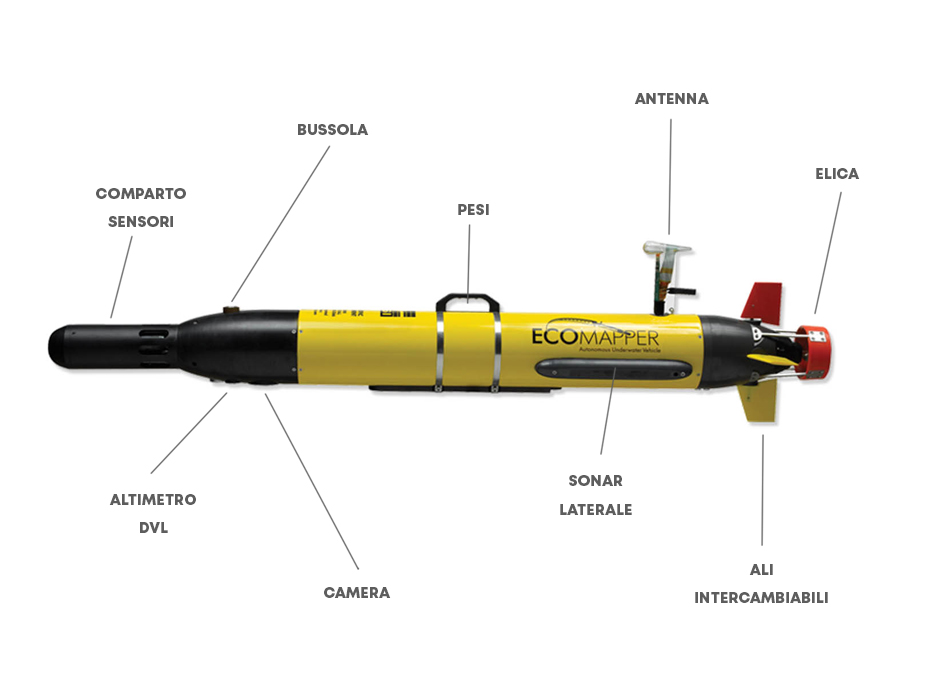
A differenza dei ROV, non essendo dotati di cavo ombelicale, non possono trasmettere immagini o altri dati in tempo reale ma li immagazzinano in modo da poter essere visionati, valutati e studiati a posteriori. Le dimensioni sono estremamente variabili e vanno dalle poche decine di chili alle diverse centinaia in base alle profondità che devono raggiungere, alla distanza ed al tempo delle missioni oppure sulla base dei payload che devono essere equipaggiati. La quantità di sensori che possono equipaggiare è vastissima: foto o videocamere ad alta definizione, sonar, magnetometri, fluorimetri (sensori di clorofilla), sensori di ossigeno disciolto, sensori di conducibilità, temperatura o profondità, sensori di pH o di torbidità (concentrazione di sedimenti in sospensione).
Possono essere azionati da un’elica oppure nel caso degli “alianti” possono essere dotati di una coppia di ali fisse che, tramite variazioni continue della galleggiabilità, sono in grado di generare portanza e quindi movimento. L’energia che occorre ad entrambe queste tipologie per il funzionamento dei sensori ed il movimento non viene erogata più attraverso il cavo ombelicale, che ricordiamo non è presente, ma proviene da tecnologie montate sul veicolo stesso: da batterie a polimeri di Litio, nella maggior parte dei casi, con alcuni modelli in grado addirittura di ricaricarle tramite energia solare durante le riemersioni oppure, con sempre meno frequenza, da celle di combustibile fossile. In ogni caso sono in grado di lavorare in acqua per lunghi periodi di tempo (anche oltre la settimana) e spesso le missioni a cui sono assegnati prevedono di stazionare per tempi più o meno lunghi nello stesso luogo oppure di farsi trascinare dalle correnti marine per rilevare dati lungo le loro rotte. Tutte attività quindi che richiedono un consumo energetico bassissimo quando non nullo.
Per comunicare la loro posizione sono spesso dotati di moduli di navigazione GNSS (GPS, Glonass, Galileo, ecc.). Tuttavia, poiché le onde radio non possono viaggiare al di sotto della superficie dell’acqua, il segnale può essere acquisito solo quando il drone è in superficie. Quando è sott’acqua, utilizza la sua ultima posizione conosciuta e calcola il movimento tramite un sistema inerziale montato a bordo in grado di misurare velocità, accelerazione e rotazione del veicolo fino alla successiva emersione e trasmissione di posizione: questo particolare metodo di navigazione è conosciuto con il nome di Dead Reckoning. La profondità viene invece calcolata con un sensore di pressione montato sul veicolo. A seconda delle necessità, viene deciso in fase di programmazione quante volte il drone dovrà riemergere per segnalare la sua posizione nel corso della missione.
Gli utilizzi principali sono la ricerca oceanica a grandi profondità, la mappatura dei fondali marini, la registrazione di informazioni ambientali sottomarine, l’identificazione di pericoli per la navigazione, l’esplorazione e la scoperta di formazioni geologiche, la documentazione di naufragi o schianti aerei oltre che per operazioni militari antisommergibile.
COS’E’ UN DPV (Diver Propulsion Device)?

Più comunemente noti come scooter subacquei, i DPV consistono in un involucro a tenuta stagna, resistente alla pressione dell’acqua, che contiene un motore alimentato a batterie LiPo, il quale aziona una o più eliche che permettono al veicolo di avanzare velocemente sotto la superficie dell’acqua. È dotato di maniglie alle quali il subacqueo si può agganciare per essere trascinato e tramite le quali può fornire i controlli basilari.
La progettazione di questi veicoli deve garantire la sicurezza del subacqueo (o dei subacquei in alcuni casi) in modo che l’elica non rappresenti mai un pericolo, inoltre non deve in nessun modo danneggiare l’attrezzatura dell’utilizzatore o la flora e la fauna marine. In ultimo deve garantire che il veicolo non possa essere avviato accidentalmente e che mantenga il galleggiamento quando non in funzione.
Il loro scopo principale è quello di estendere i limiti di azione dei subacquei consentendo una mobilità a velocità più elevate ed allo stesso tempo un consumo di ossigeno minore, vista la riduzione dello sforzo necessario ai movimenti sotto il pelo dell’acqua. Gli usi più tipici sono quindi le immersioni in grotta, dove la velocità di esplorazione e soprattutto di rientro risulta fondamentale, così come tutte le immersioni tecniche a profondità elevate dove gli scooter sono importanti, oltre che per il movimento rapido, anche per il trasporto di materiali ingombranti.
Ogni DPV può montare diversi payload quali dispositivi di illuminazione, bussole oppure macchine fotografiche o videocamere ad alta definizione.
La velocità di crociera media è intorno ai 4km/h mentre il peso è molto variabile da un minimo di due chilogrammi fino anche a superare i venti chilogrammi. Le batterie LiPo garantiscono una durata di utilizzo che in alcuni modelli può superare anche le due ore.
Detto questo è importante capire come l’utilizzo di un DPV richieda una consapevolezza estremamente maggiore durante le immersioni rispetto al nuoto tradizionale. L’utilizzatore deve essere in grado di tenere sotto controllo più fattori contemporaneamente: profondità, regolazione della galleggiabilità, navigazione, monitoraggio dei gas respirabili oltre ovviamente a tutte le accortezze da mantenere in un ambiente come quello marino durante le immersioni tradizionali. A questo va aggiunto anche il rischio di impatto aumentato dovuto alla velocità maggiore ed il pericolo rappresentato da creature marine in grado di camuffarsi con l’ambiente che possono essere notate solo muovendosi lentamente.
POSSO COMPRARE UN DRONE SUBACQUEO?
Dipende. Per quanto riguarda gli scooter subacquei se ne trovano in commercio, ormai da diversi anni, molti modelli che vanno a coprire tutte le necessità e soprattutto tutte le fasce di prezzo e, a parte l’attenzione che si deve avere durante il loro utilizzo, non hanno particolari limitazioni al loro acquisto ed uso.
Gli AUV invece sono chiaramente inaccessibili a livello consumer e vengono progettati, sviluppati ed utilizzati principalmente per la ricerca scientifica o a scopo lavorativo dalle grandi compagnie per la scansione dei fondali.
Discorso diverso invece per i ROV: per chi volesse procurarsene uno a scopo di studio, per la fotografia subacquea, per la pesca o anche semplicemente per l’osservazione dei fondali marini, è utile sapere che negli ultimi anni sono venuti alla luce alcuni modelli molto performanti pur a fronte di costi accessibili. Qui di seguito ne prenderemo in considerazione tre tra i più interessanti, con diverse peculiarità e tre diverse fasce di prezzo.
Chasing Dory di Chasing Innovation
Profondità max: 15 metri | Camera: Full HD 1080p | Batteria: 1 ora | Velocità: 1.5 nodi | Lunghezza: 188mm| Peso: 1.1 Kg

Uno dei più piccoli in commercio e sicuramente il più economico per chi volesse avvicinarsi a questo mondo. Delle dimensioni di un foglio da stampante e del peso di poco superiore al chilo può essere trasportato semplicemente infilandolo in uno zaino qualsiasi. Visti il peso e la dimensione è chiaramente pensato per un utilizzo in acque calme o molto poco agitate e comunque lontano da correnti marine di qualsiasi tipo. È dotato di una boa alla quale è collegato tramite un cavo ombelicale di 15 metri, a cui è possibile connettersi tramite WiFi da un’applicazione sul proprio tablet o cellulare. La boa è inoltre dotata di un modulo GPS in modo da poter geolocalizzare la sua posizione in caso di smarrimento. Monta una batteria LiPo che permette fino ad un’ora di esplorazione sottomarina ed una camera Full HD, oltre a due fari da 250 lumen per illuminare le acque. Tutto può essere controllato dall’applicazione anche da due persone contemporaneamente: una alla guida del drone e l’altra ad occuparsi dei movimenti della telecamera e dell’acquisizione di foto e video.
Power Ray di Power Vision
Profondità max: 30 metri | Camera: 4K UHD | Batteria: 4 ore | Velocità: 4 nodi | Lunghezza: 465mm| Peso: 3.8 Kg

Di dimensioni abbastanza contenute offre una qualità di navigazione ed una dotazione tecnica molto buone. È dotato di un ottimo cavo ombelicale di circa 70 metri di lunghezza ed è spinto da due eliche orizzontali. Sulla parte centrale del corpo monta una terza elica per eseguire i cambi di profondità in maniera semplice e veloce senza il rischio di coinvolgere nella manovra l’ombelicale. Le batterie Lipo permettono un’esplorazione dei fondali fino a 4 ore continuate con un tempo di ricarica di circa 2,5 ore. Vista la profondità ragguardevole che può raggiungere per un drone di questo tipo (fino a 30 metri) il Power Ray è dotato di due fari da 450 lumen, in grado di illuminare la scena ad una telecamera che registra video fino a 4K (3840x2160px) a 25fps e offre un live streaming in Full HD a 30fps, oltre a foto ad una risoluzione massima di 12 MegaPixel (3000x4000px) anche se, il sensore della dimensione di 1/2.3 pollici CMOS, dobbiamo ammettere, avrebbe potuto essere migliore.
Se non vi accontentate di usarlo per l’esplorazione dei fondali, la fotografia e le riprese subacquee sappiate che vi sono diverse dotazioni extra acquistabili a parte, tra le quali la più interessante è sicuramente quella che permette di aggiungere un sonar al setup standard. Il PowerSeeker FishFinder, questo il nome del payload, è in grado di rilevare con buona efficienza la fauna marina fino a 80 metri di profondità, così come la temperatura dell’acqua e la topografia del fondale ed è dotato, nella parte inferiore, di luci blu studiate appositamente per l’adescamento dei pesci.

Inutile far notare che potrebbe fare la gioia di qualsiasi pescatore in erba o professionista tuttavia, aggiungere questo optional aumenta il costo in maniera considerevole. Per gli interessati è in vendita un bundle, dal nome PowerRay Wizard, con questo payload già presente tra gli accessori, che può far risparmiare qualcosa.
Titan ROV di Geneinno
Profondità max: 150 metri | Camera: 4K UHD | Batteria: 4 ore | Velocità: 13 nodi | Lunghezza: 380mm| Peso: 4.5 Kg

Qua si comincia a fare sul serio, il Titan ROV è un mezzo piuttosto impressionante, in relazione al suo costo, ed è una scelta eccezionale per tutti coloro che vogliono esplorare le profondità.
Di dimensioni abbastanza contenute, è dotato di un cavo ombelicale di ottima fattura e di lunghezza, su richiesta, fino ad un massimo di 150 metri. Mosso da 4 propulsori, particolare che dovrebbe essere piuttosto familiare ai piloti di droni aerei, ne monta altri 2 aggiuntivi per il solo movimento orizzontale, motivo per cui può vantare un’ottima maneggevolezza nei movimenti su tutti gli assi. Anche la profondità che può raggiungere aumenta considerevolmente, può infatti essere spinto sino a 150 metri sott’acqua ed è in grado di viaggiare ad una velocità di 13 nodi. Proprio per questi motivi mostra i muscoli anche nel comparto luce, montando due lampade che raggiungono i 3000 Lumen. La telecamera nonostante, anche in questo caso, non abbia il migliore dei sensori possibili (1/2.5 pollici CMOS) rende filmati fino a 4K (3840x2160px) a 25fps e foto ad una risoluzione massima di 12 MegaPixel (3000x4000px).
Tra gli accessori inclusi, oltre che ad un trolley per il trasporto molto ben studiato, ad alcuni filtri per la camera e ad un utilissimo avvolgicavo per l’ombelicale, potete trovare anche un piccolo braccio robotico, da montare all’occorrenza, per spostare o prelevare campioni di piccole dimensioni. Infine, come acquisto opzionale, può essere equipaggiato con un sonar.
LEGGI ALTRI ARTICOLI
- 11 grandi Aziende che usano i Droni
 Dai temibili Predator dell’esercito americano a quelli ultraleggeri utilizzati da INTEL, i droni trovano sempre più spesso posto nelle grandi aziende di tutto nel mondo. Qui di seguito andremo ad elencarne 11 concentrandoci sui modi con cui sfruttano questa tecnologia per stimolare l’innovazione, tagliare i costi, aumentare l’efficienza delle proprie operazioni o addirittura salvare vite… Leggi tutto »11 grandi Aziende che usano i Droni
Dai temibili Predator dell’esercito americano a quelli ultraleggeri utilizzati da INTEL, i droni trovano sempre più spesso posto nelle grandi aziende di tutto nel mondo. Qui di seguito andremo ad elencarne 11 concentrandoci sui modi con cui sfruttano questa tecnologia per stimolare l’innovazione, tagliare i costi, aumentare l’efficienza delle proprie operazioni o addirittura salvare vite… Leggi tutto »11 grandi Aziende che usano i Droni - Caso di studio: investigazione di un incidente aereo tramite drone
 Le indagini sui luoghi di un incidente aereo stanno emergendo ultimamente come un’applicazione di grande interesse nel mondo dei droni. Puntualizziamo sin da subito che la raccolta di dati su eventi di questo genere viene spesso chiamata in causa per la produzione di materiale che viene successivamente utilizzato in via ufficiale nelle aule dei tribunali.… Leggi tutto »Caso di studio: investigazione di un incidente aereo tramite drone
Le indagini sui luoghi di un incidente aereo stanno emergendo ultimamente come un’applicazione di grande interesse nel mondo dei droni. Puntualizziamo sin da subito che la raccolta di dati su eventi di questo genere viene spesso chiamata in causa per la produzione di materiale che viene successivamente utilizzato in via ufficiale nelle aule dei tribunali.… Leggi tutto »Caso di studio: investigazione di un incidente aereo tramite drone - DRONE FPV: droni freestyle e droni da corsa
 La sigla FPV, acronimo di First Person View ovvero “Visuale in Prima Persona” è un modo di interagire con un drone in grado di regalare un’esperienza unica ad un livello di immersione che non ha eguali.In sostanza, grazie ad uno speciale visore, la vostra coscienza visiva viene trasferita nel corpo di una macchina volante molto… Leggi tutto »DRONE FPV: droni freestyle e droni da corsa
La sigla FPV, acronimo di First Person View ovvero “Visuale in Prima Persona” è un modo di interagire con un drone in grado di regalare un’esperienza unica ad un livello di immersione che non ha eguali.In sostanza, grazie ad uno speciale visore, la vostra coscienza visiva viene trasferita nel corpo di una macchina volante molto… Leggi tutto »DRONE FPV: droni freestyle e droni da corsa - Drone Soccer: lo Sport che viene dal Futuro
 Il calcio con droni o meglio il Drone Soccer è lo sport aereo internazionale più recente riconosciuto dalla Féderátion Aéronautique Internationale, l’organizzazione che governa tutti i record aerei e gli sport d’aria a livello mondiale, e va ad aggiungersi all’unico altro sport competitivo praticato con i droni ovvero la corsa. A differenza delle gare di… Leggi tutto »Drone Soccer: lo Sport che viene dal Futuro
Il calcio con droni o meglio il Drone Soccer è lo sport aereo internazionale più recente riconosciuto dalla Féderátion Aéronautique Internationale, l’organizzazione che governa tutti i record aerei e gli sport d’aria a livello mondiale, e va ad aggiungersi all’unico altro sport competitivo praticato con i droni ovvero la corsa. A differenza delle gare di… Leggi tutto »Drone Soccer: lo Sport che viene dal Futuro - Droni con Termocamera: funzionamento e utilizzi
 Le immagini termiche rilevate tramite l’utilizzo di droni con termocamera stanno guadagnando, anno dopo anno, sempre maggiore popolarità. Grazie al continuo miglioramento tecnico degli UAS sui quali viene montata la termocamera, seguito da una maggior durabilità delle batterie con il conseguente aumento dei tempi effettivi di volo e, fattore non meno importante, grazie alla qualità… Leggi tutto »Droni con Termocamera: funzionamento e utilizzi
Le immagini termiche rilevate tramite l’utilizzo di droni con termocamera stanno guadagnando, anno dopo anno, sempre maggiore popolarità. Grazie al continuo miglioramento tecnico degli UAS sui quali viene montata la termocamera, seguito da una maggior durabilità delle batterie con il conseguente aumento dei tempi effettivi di volo e, fattore non meno importante, grazie alla qualità… Leggi tutto »Droni con Termocamera: funzionamento e utilizzi